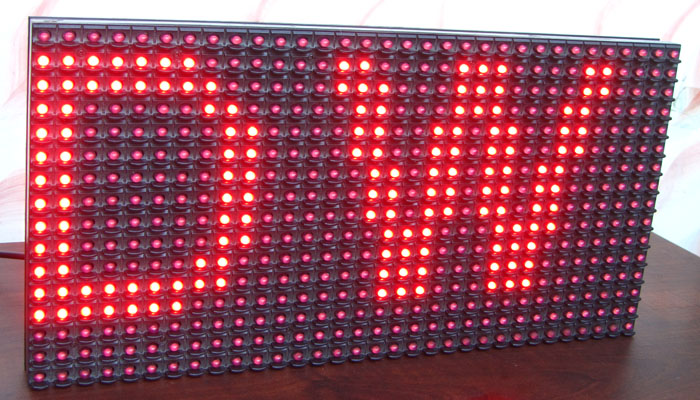
Room Temperature Display using Large Dot Matrix P10
This article on DigitalWizard describes how you can easily make a system that shows room temperature in dot matrix 32×16 LED display. The project is based on ATmega8 MCU which is a 28 pin high performance microcontroller from Atmel Corp. Please click here to read more.