PIC16F877A Serial Communication Demo
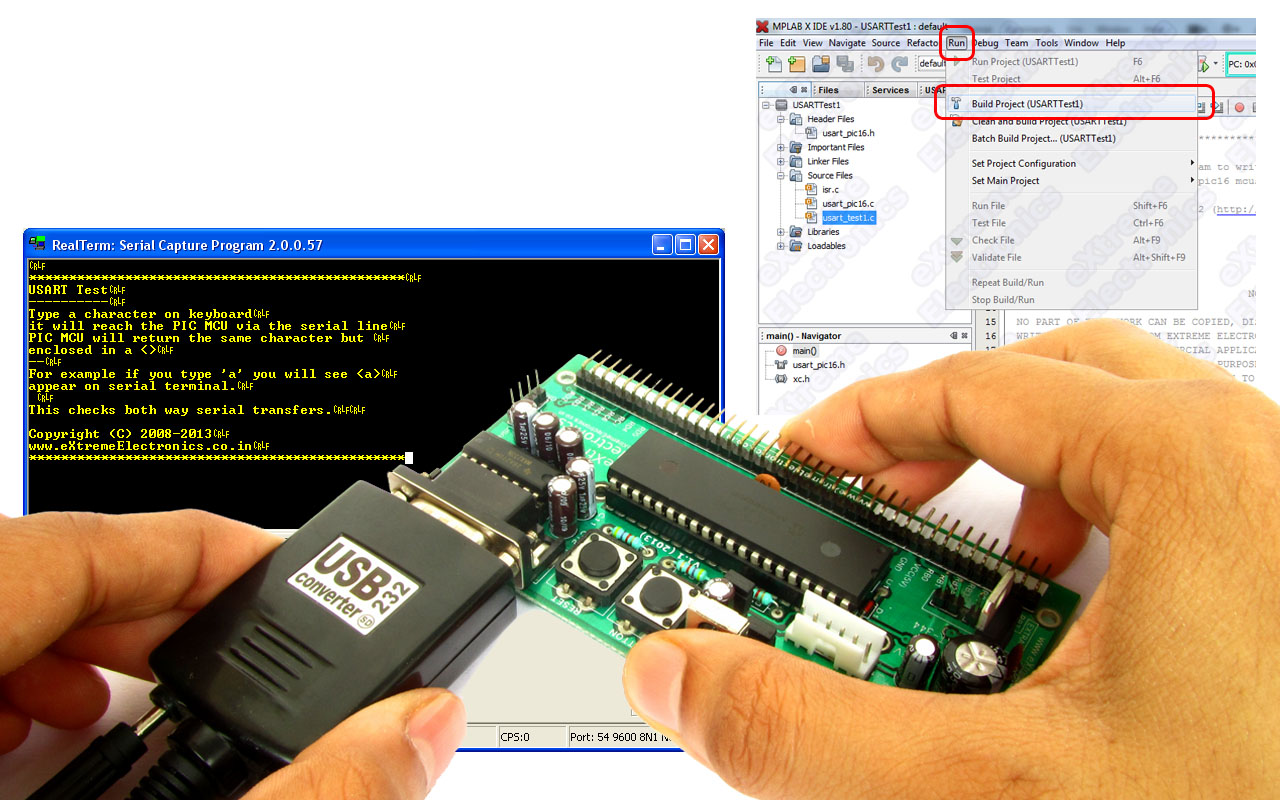
In the last two tutorial we discussed how to make the hardware for serial communication and how to setup a MPLABX Project with support for serial communication functions. Then we complied a demo program to use those serial communication functions and burnt the final hex file to our PIC16F877A development board. Now its time for us to run this demo. Setting up hardware for PIC Serial Communication USART Library for PIC – Setup on MPLAB X IDE To interact with this demo running on your PIC development board. You need a terminal program. A terminal program is a utility tool running on PC that helps you view text data coming from the serial port and also send data to the port. This is handy for initial development of connected hardwares. We use Real Term for this purpose. You can download it from here. Download Real Term. RealTerm The top black area show the character data as they are received by the serial port. The received characters are shown in YELLOW coloured text. The bottom area has lots of tab on it. The Port tab (shown above) is used to configure the serial port. Configure the port exactly as show in the image above. Baud = 9600 Port = <the serial port number where you have connect the PIC development board> […]